Introduction
The Bit:Bot is a buggy that is designed to be controlled by a microbit.
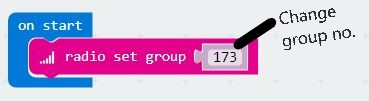
The microbit runs hex files. These can be programmed using the JavaScript Blocks Editor at the makecode page. You wil be given working hex files which can be uploaded into the makecode page (Projects, Import File). You can make changes to the code. Make sure to choose a new radio group (0 to 255) and change the code to use your choice. Download your altered hex files and transfer them onto the controller microbit and the Bit:Bot microbit (Use "Save as..." for example)
Microbit organization home page
Tilt and button control
Two hex files can be downloaded here
The first one is the hex file for the transmitting microbit (the controller) and the second is for the receiving microbit (the bot). The controller transmits "B:1" if the B button is pressed and if the A button is pressed "Pitch:Value" and "Roll:Value". The bot receives these messages and has an algorithm that sets the motor settings: if B pressed a hop backwards or if A pressed go forwards according to amount of pitch and roll the controller has sent.
Switch on the bot holding it off the floor; if it goes into "PAIRING MODE" reset it (reset button on bottom - you will need a paperclip or thin pencil for this)
Tank control with Ultrasound or Lights
Three hex files can be downloaded here
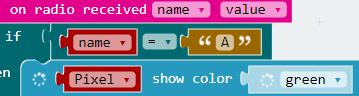
The controller transmits "A:1" or "A:0" depending if A is pressed and "B:1" or "B:0" depending if B is pressed. The bot receives these message. The controlling hex scripts turn left and right motors on or off according to the message. The ultrasoubd hex script has an algorithm that makes the bot stop/back away from obstacles. The lights hex script uses the NeoPixel package to light up with received messages]